Convolutional Neural Networks
Table of Contents
继续突击这门 课程. CNN是DNN的一种特殊实现,专门解决输入是图像这种带有局部空间性质的半结构化的数据。这门课程介绍了CNN的基本原理,以及几种基本实现,然后介绍了CNN的几种应用:物体检测,脸部识别,以及 风格迁移。
说实话课程难度还是比较高的,到后面几个weeks的作业光是写graph都已经焦头烂额了,更别说如果作业要求从头实现BP的话会怎么样。作业开始逐渐依赖于keras和tensorflow这种high level framework了,更多地强调如何构建起这些网络以及如何运行。
1. CNN的卷积基础
filter应该是怎么样的?假设input image shape是(64, 64, 3)的话,那么filter的最后一个维度也必须是3. 如果filter size是5的话, 那么一个filter shape应该就是(5, 5, 3) .
在CNN里面的convolution, 其实准确地说应该是cross-correlation,不过在CNN的文章里面大家都是这么使用的,实际上效果的确和convolution一样。
一个filter(5,5,3)应用在input(64, 64, 3)上的话,假设padding=0, stride=1, 首先得到的结果是(60, 60, 3), 然后每个像素上的channel value叠加起来,类似 `np.sum(input, axis = -1)`. 最终一个filter下去,结果是(60, 60, 1). 如果有F个filter的话,那么output就是(60, 60, F)
def conv_single_step(a_slice_prev, W, b):
"""
Apply one filter defined by parameters W on a single slice (a_slice_prev) of the output activation
of the previous layer.
Arguments:
a_slice_prev -- slice of input data of shape (f, f, n_C_prev)
W -- Weight parameters contained in a window - matrix of shape (f, f, n_C_prev)
b -- Bias parameters contained in a window - matrix of shape (1, 1, 1)
Returns:
Z -- a scalar value, result of convolving the sliding window (W, b) on a slice x of the input data
"""
### START CODE HERE ### (≈ 2 lines of code)
# Element-wise product between a_slice and W. Do not add the bias yet.
s = W * a_slice_prev
# Sum over all entries of the volume s.
Z = np.sum(s)
# Add bias b to Z. Cast b to a float() so that Z results in a scalar value.
Z = Z + float(b)
### END CODE HERE ###
return Z
为什么要使用卷积呢?主要还是和图像这种数据性质有关,图像这种半结构化数据在局部空间上呈现相似性。最终带来的好处有两个:1. 参数共享 2. 稀疏连接。 每层layer weight数量,只是和filter相关。b比如filter大小(5, 5, 16), 一种64个filters的话,参数也就是(400 + 1) * 64。
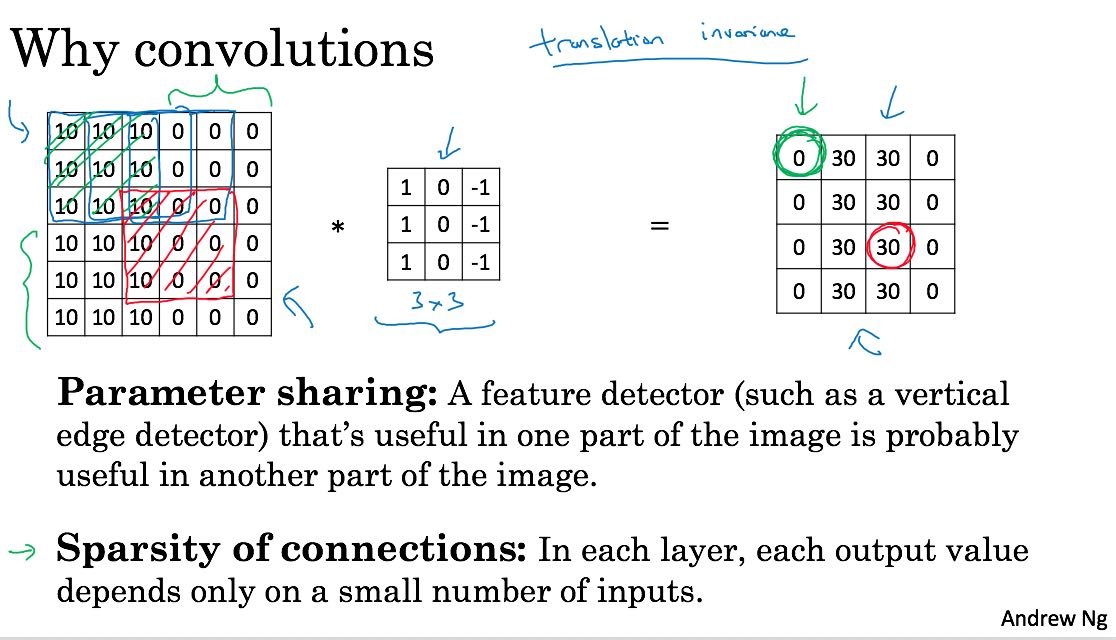
通常来说,随着层数增加,H,W不断减小,而C不断增加。(C可以认为是feature detectors的数量)
2. 几种经典的CNN实现
我就直接照抄ppt了,可以认为这几种实现上没有更多概念的引入(相比后面的resnet和inception).
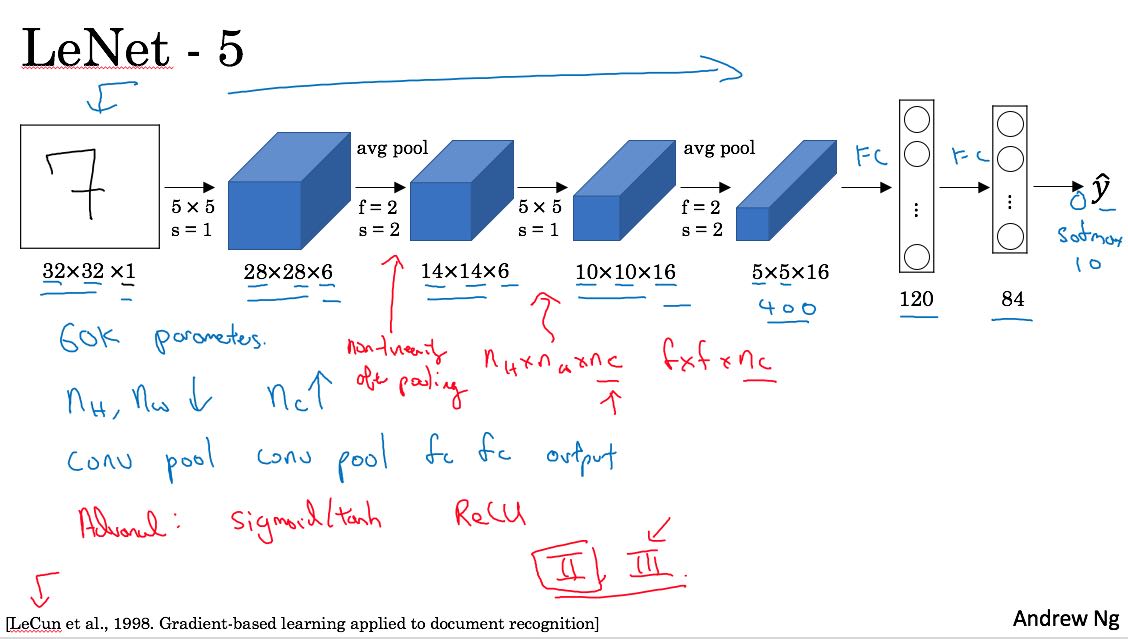
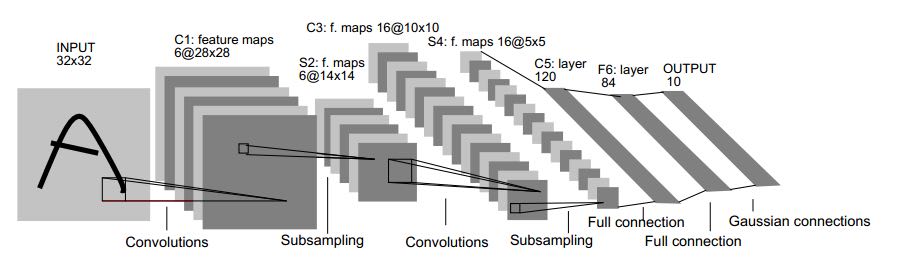
lenet-5解决当时手写数字识别问题。当时我看论文的时候也截了个图,可以对比一下Andrew Ng给的图和论文里面的图。看上去好像差不多。一共大约60k个参数。
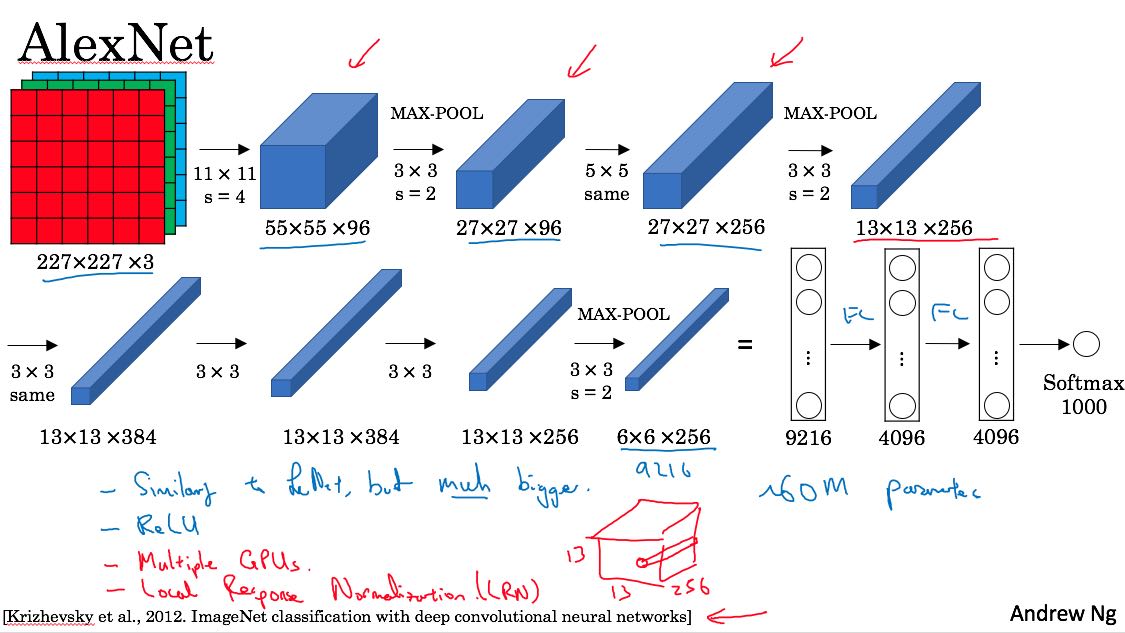
alexnet则是在2012年imagenet比赛中,geoff hinton团队实现的CNN。和lenet-5没有什么本质区别,只不过更大了,然后用了relu, multiple GPUs(因为GPU内存很小),local response normalization(lrn)技术。参数大约有60m个,是lenet-5的1000倍。
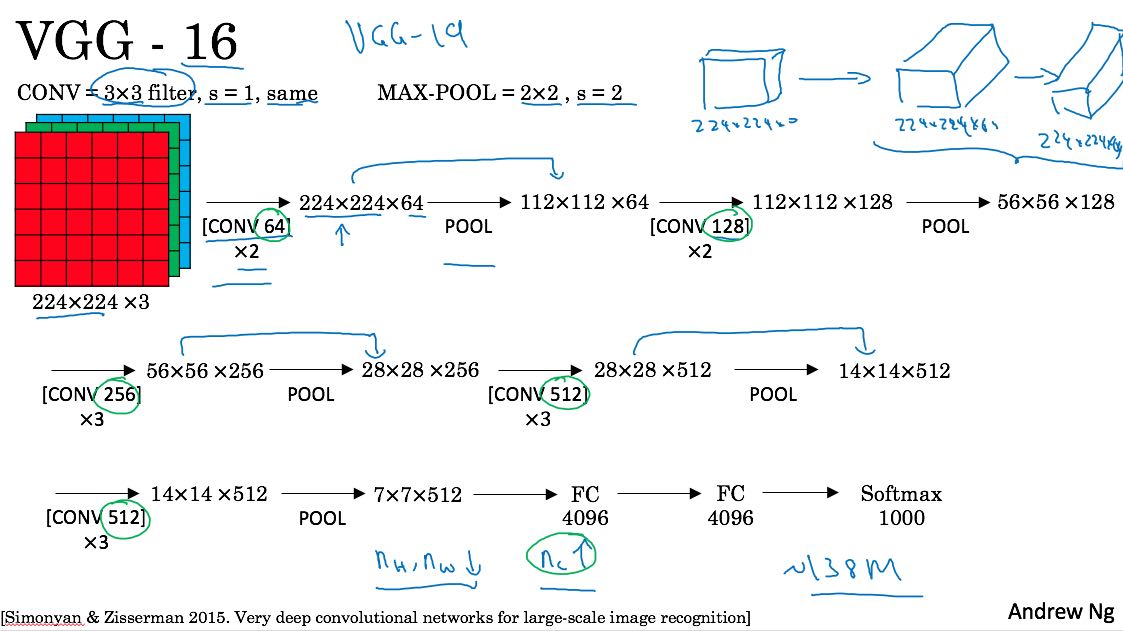
alexnet使用了很多比较奇怪的参数和结构,vgg则尝试是否可以使用简单的配置但是更加大的网络,来获得更好的效果呢?vgg里统一采用(3,3)的filter, 然后都是(2,2)的max-pool,结构上比较规整。vgg-16有138M个参数,vgg-19则有更多的参数。
3. Residual Network
残差网络,大意是经过几个layer之后,将原始输入叠加上去。残差网络是由多个residual block组成的
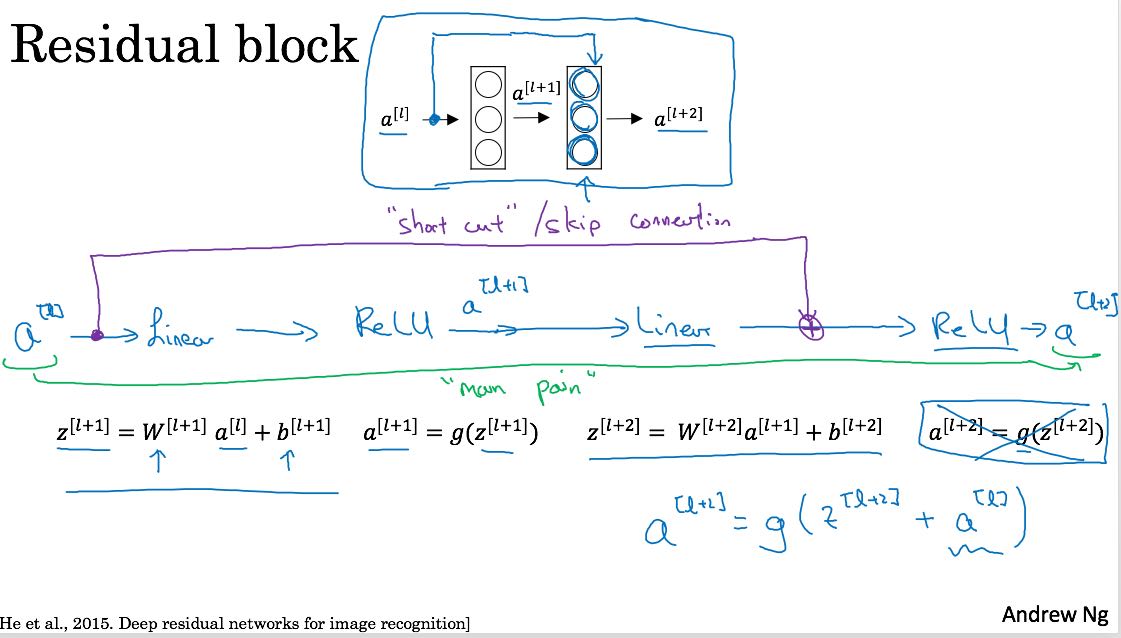
将原始输入叠加进去,可以成为一个skip connection. 有了这些residual block之后,就可以将这些Blocks组合起来做成一个residual network.
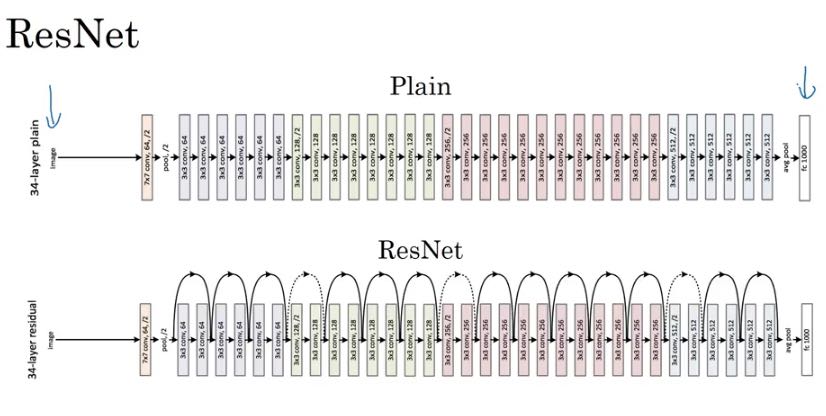
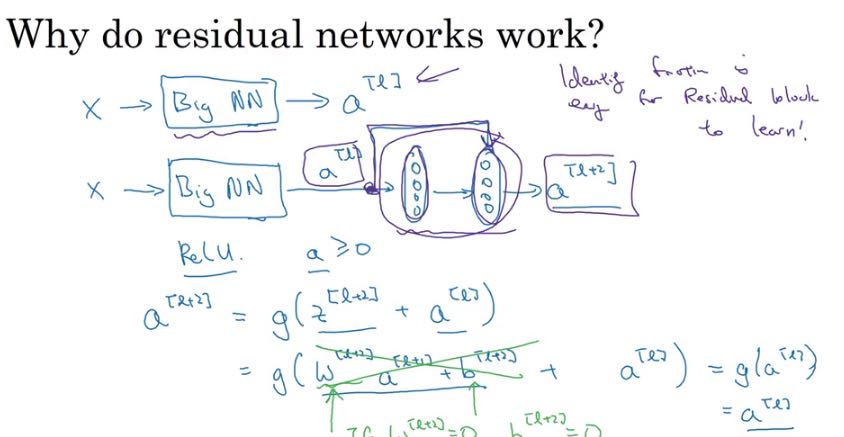
resnet可以更好地训练更深的神经网络,一个很重要的原因就是因为res block可以很容易地学到identity mapping以及梯度消失。下面slide说明了为什么更容易学到id mapping. 如果w,b~=0并且g是relu函数的话,那么a[l+2] ~= g(a[l]) = a[l]
4. Inception Network
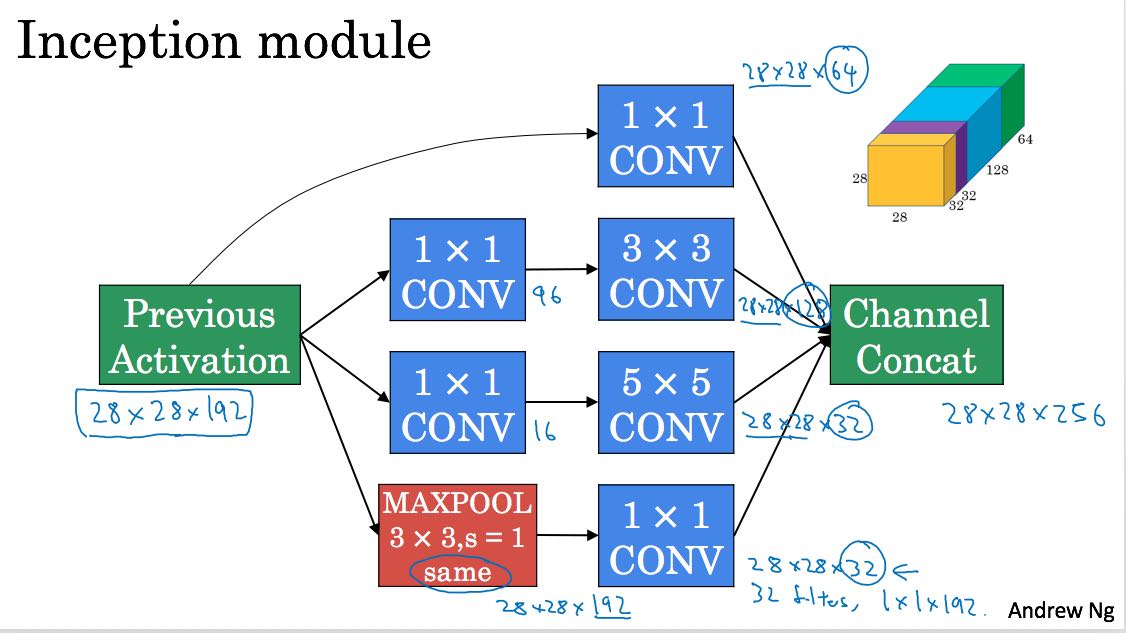
Inception network是google搞出来的,出发点很简单,就是我自己也不确定filter size是什么值比较合适,所以干脆把1, 3, 5, 都试试,然后放在一起作为output. 下图
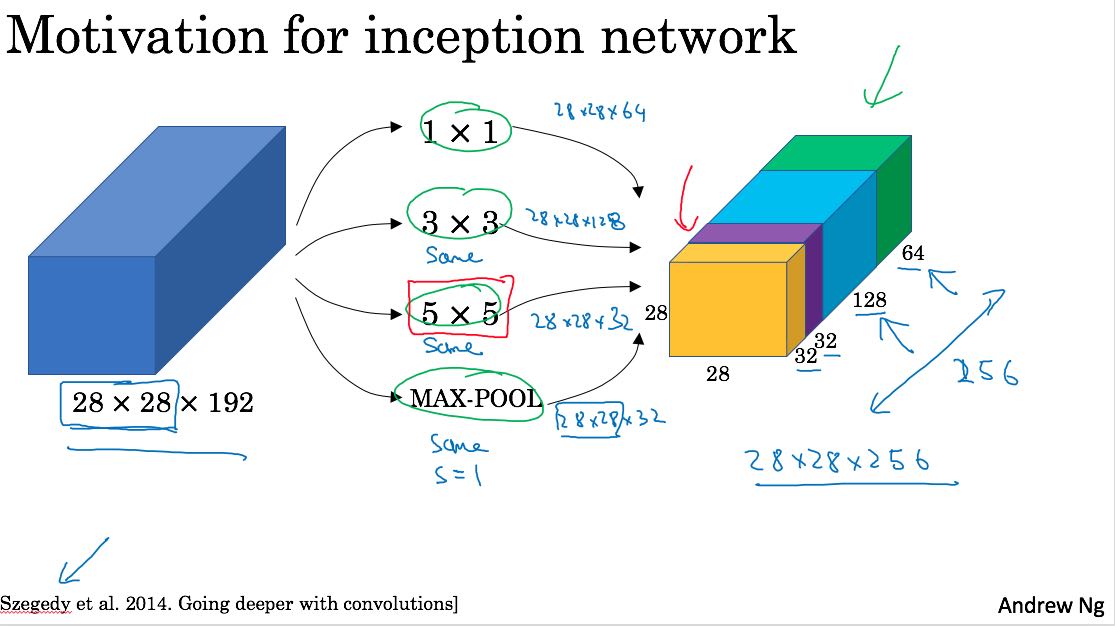
里面用到了1x1的filter. 1x1的filter意义不大,apply下去之后h,w都不变,只有c会改变。这个filter有一个特别的用途,就是减少conv的计算量。看看下面两个图
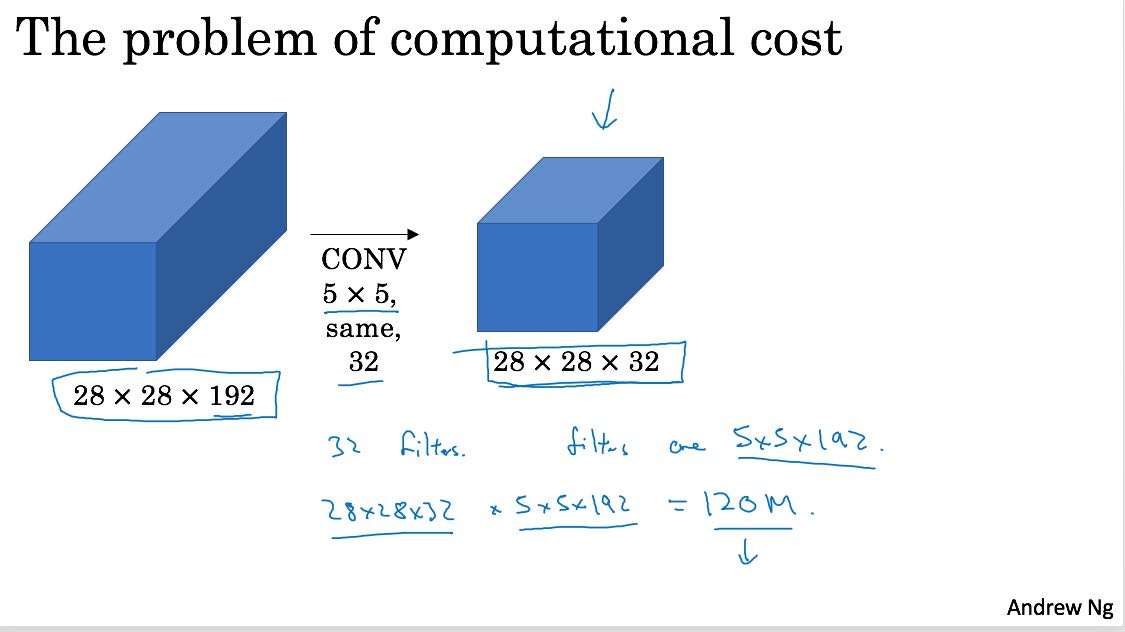
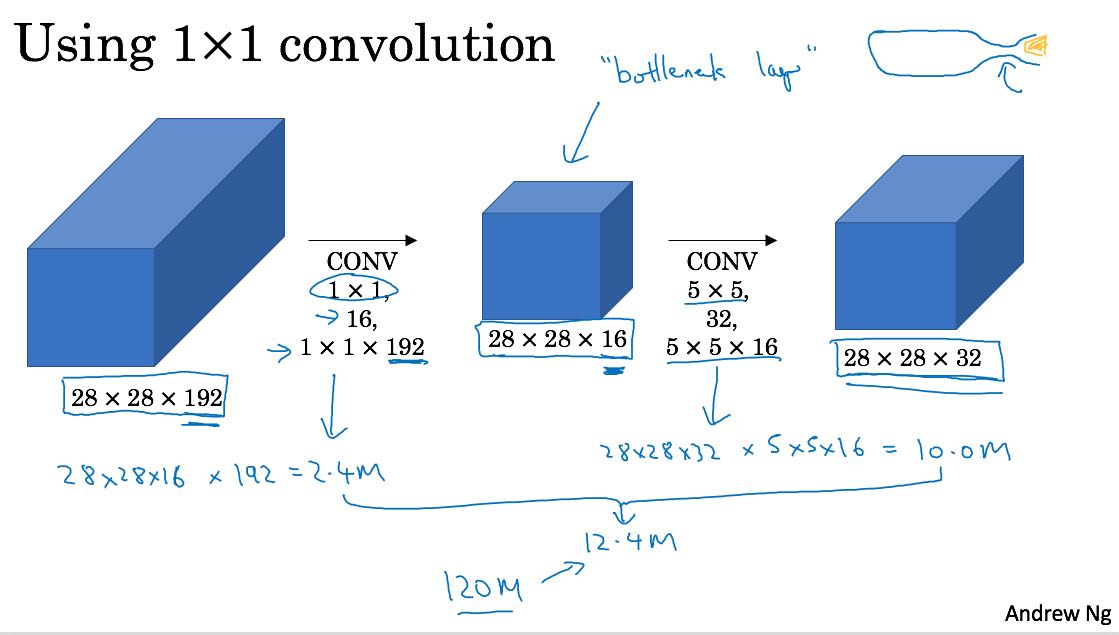
- 第一个计算量是 (5 * 5 * 192) * (28 * 28 * 32) ~= 120M
- 第二个计算量通过1x1 conv间接地得到
- stage1 192 * (28 * 28 * 16) ~= 2.4M
- stage2 (5 * 5 * 16) * (28 * 28 * 32) ~= 10M
- 一共大约12.4M
- 我在纸上推导了一下好像是可以这么计算,前提是必须通过1x1的conv
如果1x1 conv可以帮助3x3 conv, 5x5 cov的话,所以最终一个inception block就是下面这样
然后将这些block组织起来就是下面这样的inception network. Andrew在slide上面标注每个inception bock. 这个inception network又称为googLeNet, 最后面和lenet一样,也是为了致敬lenet吧。
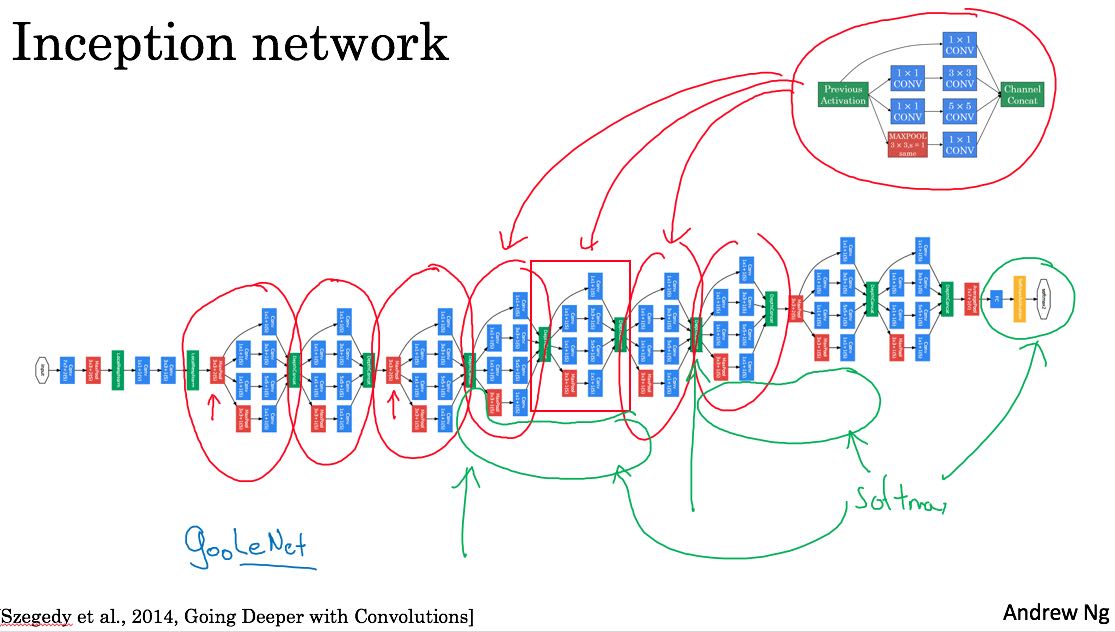
至于为什么叫做inception network, 完全是因为盗梦空间(Inception)这部电影。电影里面小李子有句台词 "we need to go deeper"
5. Practical Advices
Data Augmentation在图像上可以适度使用,包括下面几种方法:
- mirroring 镜像操作
- cropping 裁剪操作
- color shifting RGB偏移操作
这些方法对CNN学习有帮助,一些方法比如rotate等对CNN则并不起什么作用。
比赛时一定要使用ensemble, 并且在predict阶段可以对test input进行multi crop, 裁剪出多份图像分别进行预测,然后将结果综合。不过这些技巧在实践中不太使用,对性能是会有影响的。
6. 物体检测(Object Detection)
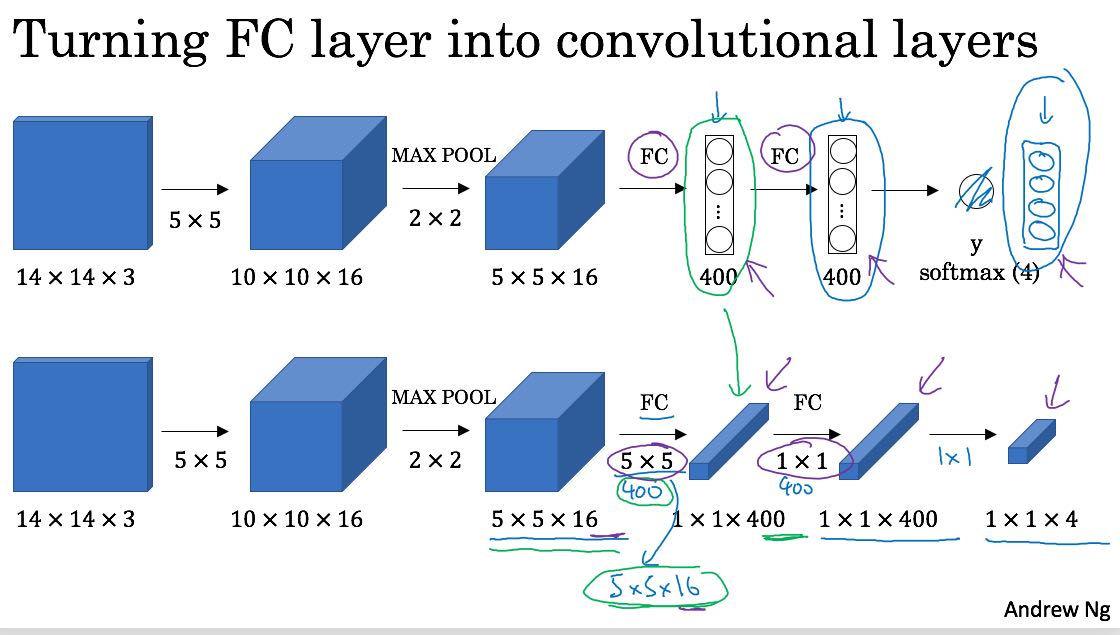
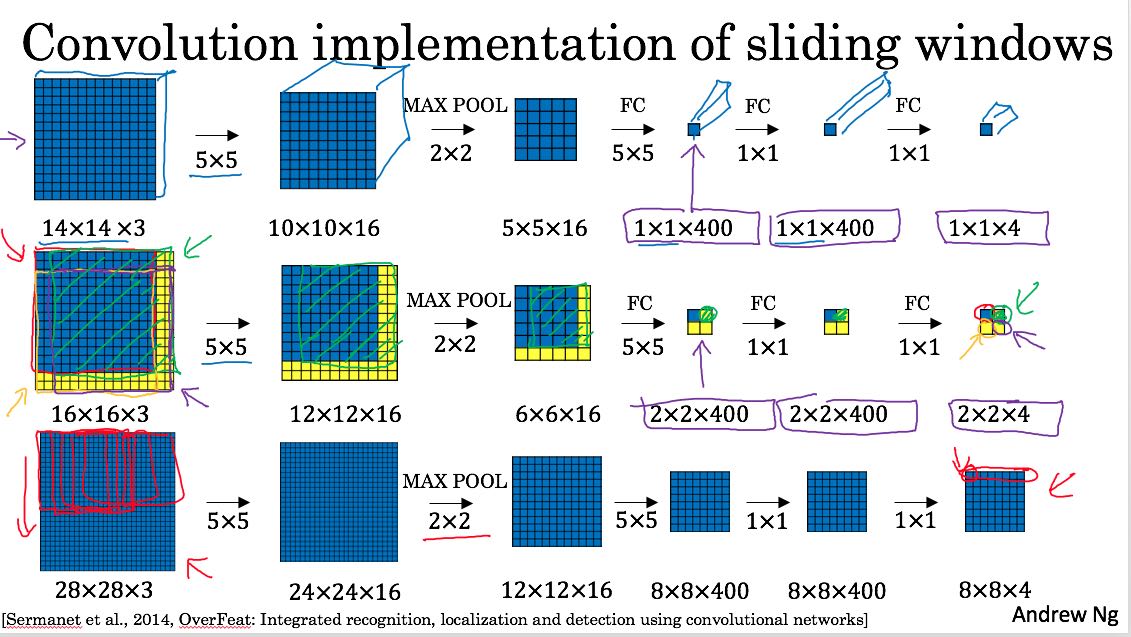
物体检测一个naive/simple的办法,可以是将图像配合不同尺寸的sliding window, 然后对每个sliding window下面的图像输入到CNN,判断这个小图片里面是否有某个物体。姑且称这种方式是sliding window吧。
这种方式有个缺点,是没有办法动态地调整sliding window size,要不就预先定义好。此外这种方法的naive实现计算量比较大,有种办法可以减少计算量。就是把convolution和sliding window结合起来。下图大概说明了这个办法:FC其实可以使用convolutional layer来表示,这样整个network下面都是conv. 然后在Output里面,其实可以对应到每个sliding window的计算结果。
物体检测上state-of-art技术应该是YOLO(you only look once). 实现上分为下面几步:(先假设我们只detect一种object)
- 将输入图片分为9x9或者是19x19个grids.
- 每个grid上单独进行预测,输出包括(P, bx, by, bh, bw). 每个五元组为一个box, 可以有很多boxes
- P 表示检测到物体的概率
- 其中bx, by是这个物体的middle point, bh, bw则是长宽
- 数值上都是grid的比例,比如bx, by = 0.5, 0.5, 表示middle point在grid的中心
- bh, bw可以超过1, 也就是说占据多个grids
- 针对这些boxes, 运行non-max suppression. 算法很简单
- 将boxes中P低于某个值(0.4)去掉,这些box是object概率很小
- 从boxes中选择P最大的box(A),认为A里面有Object
- 然后剩余boxes中,如果和A的重合比例超过某个值(0.5)的话,那么丢弃
- 重复2,直到没有boxes为止
重合比例计算可以用IOU(intersect over union), 也就是重合面积 / (A + B - 重合面积)。IOU很高的话,认为其实两个box重复。
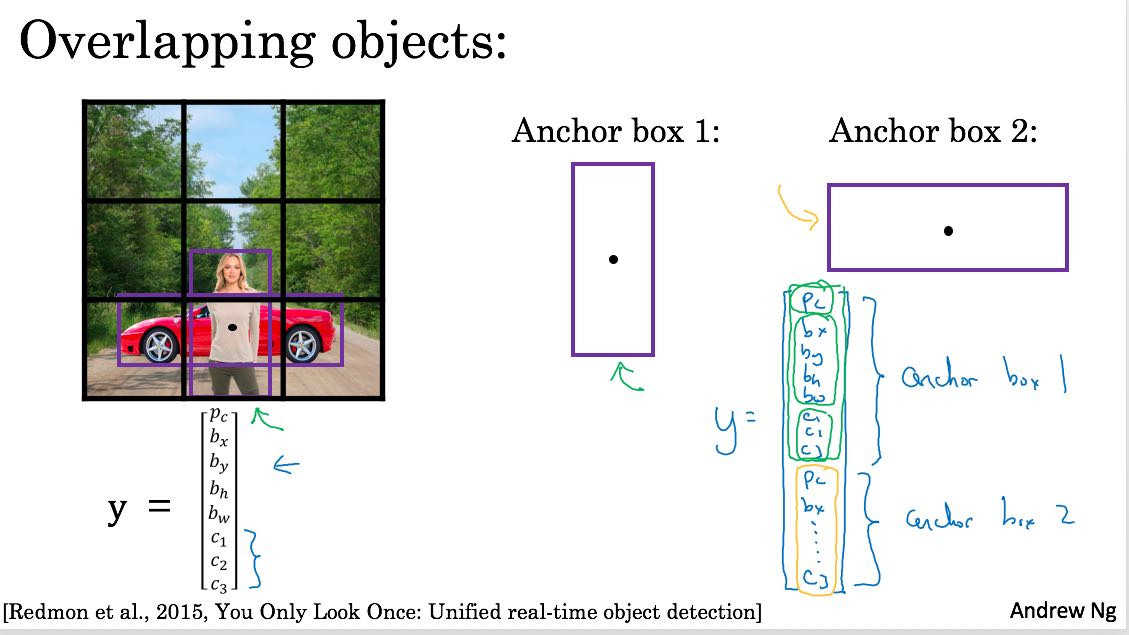
如果需要检测多个物体的话,那么在一个grid里面可能会检测到多个objects,那么需要anchor box来帮助。anchor box实际上是帮助定位是哪一类objects的。比如下图:
- 在最下面的grid里面会检测到两个objects.
- 美女更加匹配anchor box1, 而汽车更加匹配anchor box2.
- y里面包含两个anchor对应的向量
7. 脸部识别(Face Recognition)
Face Recognition其实可以通过另外一个问题解决,就是FV/Face Verification. Face Verification会比较两个图片的相似度,而FR则可以使用这个相似度来选择和谁最匹配。
假设现在我们已经有了比如VGG-16这种可以识别图片的网络(DeepFace, FaceNet),取最后一层FC,这层FC的值可以认为是图像指纹(fingerprint). 通过比较这两个指纹的距离,就可以得到两张图片的相似度。
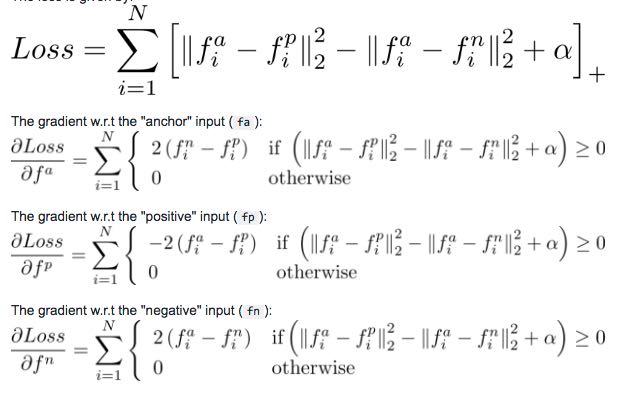
如何对这个网络做训练呢?triplet loss. 大致意思就是,有一个基准图片(anchor), 正样例(positive), 负样例(negative). 尽可能地使dist(anchor, positive)小,而使dist(anchor, negative)大。
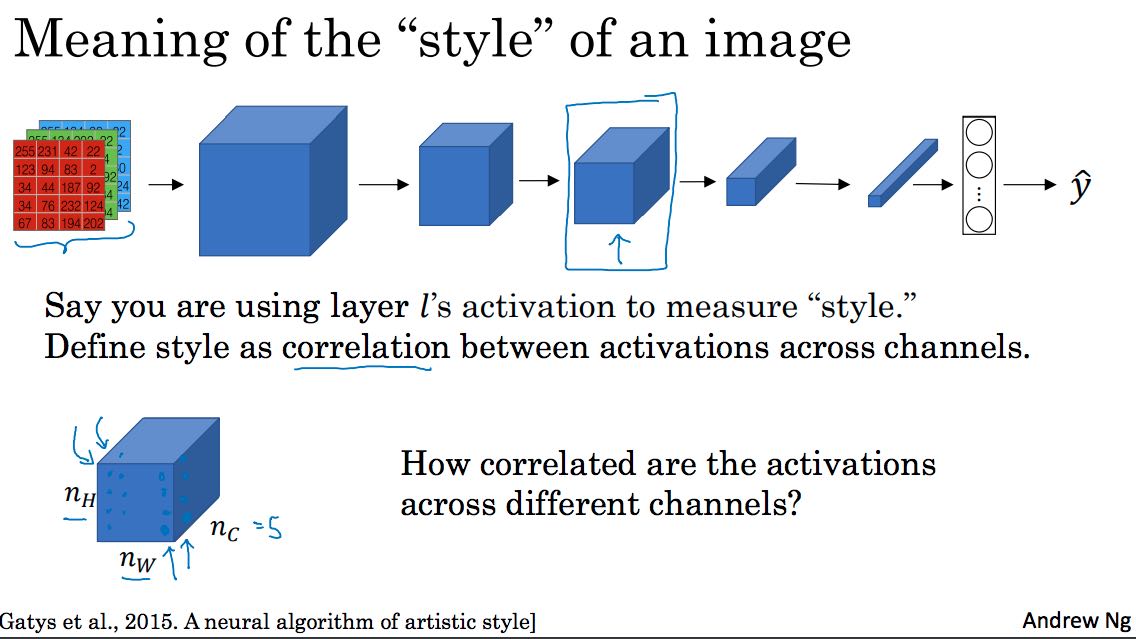
8. 风格迁移(Neural Style Transfer)
风格迁移的难点在于定义cost function,假设内容图像是C(content), 风格图像是S(style), 生成图像是G(generated), 那么J(C, S, G) = J(C, G) + J(S, G).
J(C, G)表示内容图像和生成图像的偏差,假设我们有VGG-16的话,那么只需要抽取C, G在vgg-16的某个比较高的layer(conv4-2)输出,然后计算距离即可。
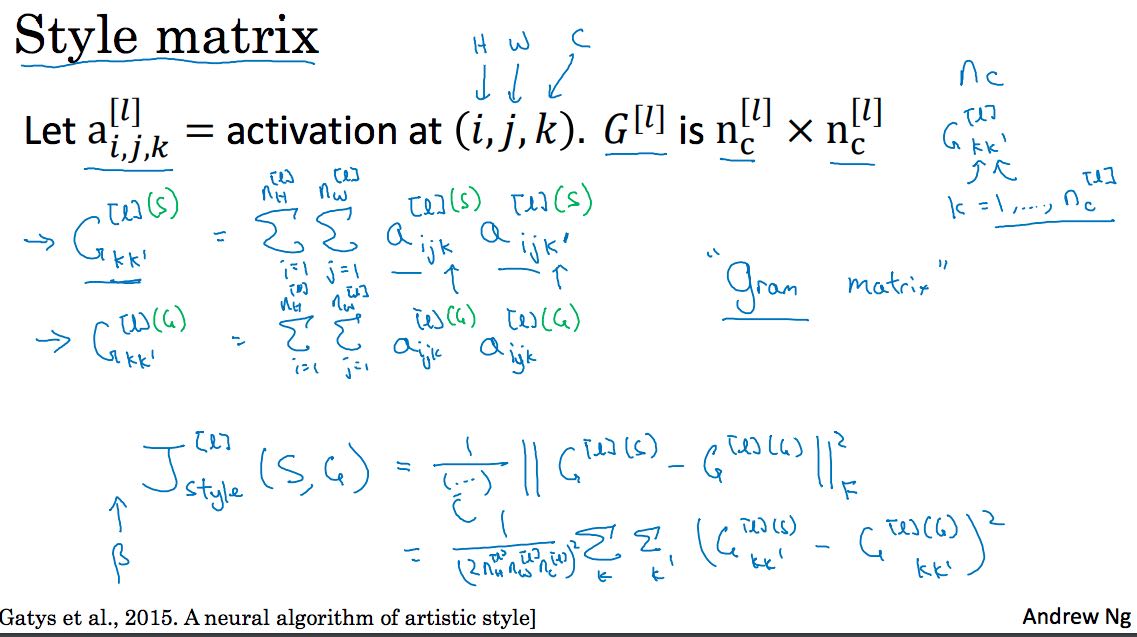
J(S, G)表示风格图像和生成图像的偏差,风格可以认为是,每个像素值在各个channel上的关联。具体地,需要计算每层的风格差异然后叠加。